Бильярдная физика (продолжение)
Движение шара можно разложить на поступательное движение его центра масс под действием внешних сил и вращение относительно центра масс под действием моментов этих сил.
Вращение в трёхмерном пространстве — это вращение на определённый угол вокруг определённой оси.
При рассмотрении движения шара используют две системы координат Oxyz: неподвижная система координат и подвижная система координат.
-
Движение шара раскладывется на:
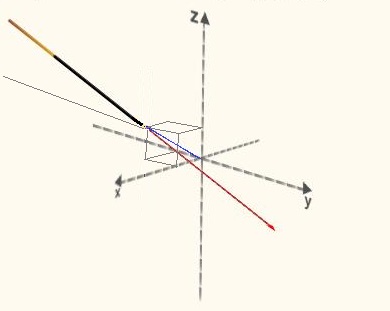
- поступательное движение со скоростью центра масс относительно неподвижной системы координат с началом в некоторой точке. [Координатные оси удобно взять так, что направление движения центра шара совпадает с положительным направлением оси Y, ось X - проведенная горизонтально перпендикулярно оси Y, ось Z - вертикально вверх. Координаты x и y лежат в поверхности, z перпендикулярно поверхности.]
- вращательное движение вокруг центра масс с мгновенной угловой скоростью (ω). В центр шара поместим подвижную систему координат, которая неподвижно связана с центром масс шара и совершает поступательное движение вместе с ним. Такую систему отсчета называют системой центра масс. Таким образом в системе центра масс центр масс покоится, и существует только движение относительно центра масс.
Для анализа вращения шара целесообразно перейти в систему центра масс, то есть в инерциальную систему отсчета, в которой центр масс тела покоится, а оси координат имеют неизменные направления в пространстве.
В этой системе отсчета движение шара - вращение вокруг неподвижной точки (вокруг центра масс).
Т.о. вращение шара вокруг центра масс в системе центра масс - вращение вокруг мгновенной оси, проходящей через этот центр с мгновенной угловой скоростью (ω).
Кинематика вращения вокруг неподвижной точки характеризуется вектором мгновенной угловой скорости.
Угловая скорость (ω) — это векторная величина, определяющая быстроту изменения угла поворота тела относительно оси вращения. Вектор угловой скорости направлен вдоль оси вращения в ту сторону, откуда вращение видно происходящим против хода часовой стрелки. Такой вектор определяет сразу и модуль угловой скорости, и ось вращения и направление вращения вокруг этой оси.
При ударе кием не направленным в центр шара, шар получает от кия не только импульс, который приводит шар в поступательное движение, но и момент импульса, который приводит шар во вращательное движение.
Импульс характеризует количество поступательного движения. Изменение импульса шара при ударе равно импульсу ударной силы (ударному импульсу).
[Силы, действующие на тела, можно разделить на силы, изменяющие скорость точек непрерывно и силы, изменяющие скорости точек тела в течение очень малого промежутка времени, такие силы возникают при ударе и называются ударными силами.
Ударные силы, будучи равными нулю в начале и конце удара, в процессе соударения изменяются в значительных пределах. В теории удара изменение импульса тела равно импульсу средней силы, действующей на тело. Импульс силы, мера действия силы за некоторый промежуток времени. Ударный импульс, импульс ударной силы, действующий на каждое из соударяющихся тел при ударе. Ударный импульс, равняется произведению среднего значения силы на время её действия: ] Поступательная скорость шара за время контакта кия с шаром увеличиваются от нуля до той скорости с которой шар начинает двигаться сразу после удара (V) - шар получает от кия импульс, который приводит шар в поступательное движение.
- импульс ударной силы.
Вращательная скорость шара за время контакта кия с шаром увеличиваются от нуля до той скорости с которой шар начинает вращаться вокруг центра масс сразу после удара (ω) - шар получает от кия момент импульса, который приводит шар во вращательное движение.
Вращение шара вокруг центра масс - вращение вокруг мгновенной оси, проходящей через этот центр с мгновенной угловой скоростью (ω).
Вращение вокруг оси проходящей через центр масс рассматривается в той системе отсчета, в которой она покоится (системе центра масс)
Для описания вращения достаточно рассмотреть проекции векторов моментов импульса и силы на ось вращения.
Момент импульса тела весьма сложно зависит от распределения масс в теле. Его направление в общем случае не совпадает с направлением угловой скорости вращения.
Для тела любой формы и с произвольным распределением массы существуют три взаимно перпендикулярные, проходящие через центр инерции тела оси (центр масс), которые могут служить свободными осями. Свободной осью тела называется ось вращения, положение которой в пространстве сохраняется без действия на нее каких-либо сил извне. Такие оси называют главными осями инерции тела. Совпадение направлений векторов момента импульса и угловой скорости будет тогда, когда угловая скорость направлена вдоль одной главных осей инерции тела.
Все оси симметрии твердого тела являются главными осями инерции. У тела с центральной симметрией ни одна из главных осей не фиксирована, ими могут служить любые три взаимно перпендикулярные оси, проходящие через центр симметрии. Для этих осей моменты инерции равны. Такое тело называется шаровым волчком. Это значит, что любая ось, проходящая через центр масс шара, будет главной осью инерции (осью свободного вращения), т.о. при любом направлении вектора мгновенной угловой скорости вектор момента импульса будет совпадать с ним по направлению.
В данном случае,
Поместим начало координат в центр шара ((.) O), тогда Ox, Oy и Oz - оси координат - главные оси инерции шара.
Сумма вращений относительно пересекающихся в одной точке осей представляет собой вращение вокруг мгновенной оси. Соответственно верно и обратное, математически в каждый момент вращение вокруг (единственной) мгновенной оси можно разложить на ряд вращений вокруг осей, пересекающихся в одной точке.
, , - cоставляющие вектора угловой скорости относительно центра по осям координат.
Направление мгновенной оси вращения определяется вектором, равным геометрической сумме векторов угловых скоростей составляющих движений.
Произведение дает составляющую вектора момента импульса по оси x.
Произведение дает составляющую вектора момента импульса по оси y.
Произведение дает составляющую вектора момента импульса по оси z.
Результирующий вектор момента импульса будет совпадать по направлению с вектором если моменты инерции относительно главных осей , , равны между собой, либо вектор направлен по одной из главных осей, тогда составляющие по остальным осям будут равны нулю.
Для шара:
I - момент инерции однородного шара относительно любой главной оси инерции - любой оси, проходящей через центр масс.
Моментом силы называют вращательное усилие создаваемое вектором силы относительно оси или точки.
Моментом силы относительно точки O называется вектор равный векторному произведению радиуса-вектора , проведенного из точки O в точку приложения силы, и вектора силы .
Вектор приложен в точке O и направлен перпендикулярно плоскости, проходящей через центр O и силу (то есть плоскости в которой лежат векторы и ), в ту сторону, откуда сила видна стремящейся повернуть тело вокруг центра O против хода часовой стрелки.
Модуль момента силы относительно точки равен произведению силы на плечо d.
Точка O - центр масс шара.
Момент силы относительно оси будет иметь знак плюс, когда с положительного конца оси тело под действием заданной силы представляется вращающимся вокруг оси против хода часовой стрелки, и знак минус - когда по ходу часовой.
Изменение момента импульса шара относительно центра (О) при ударе равно моменту ударного импульса.
Вращательная скорость шара за время контакта кия с шаром увеличиваются от нуля до той скорости с которой шар начинает вращаться сразу после удара (ω). [Вращение вокруг мгновенной оси проходящей через центр масс в системе центра масс]
Т.о шар получает от кия момент импульса, который приводит шар во вращательное движение.
Для шара любая ось, проходящая через центр масс будет главной осью инерции, т.о. при любом направлении вектора угловой скорости вектор момента импульса будет совпадать с ним по направлению.
В данном случае вектор момента силы направлен по мгновенной оси вращения, проекция векторного момента силы на ось будет равна модулю момента силы относительно точки, взятому с соответствующим знаком.
В качестве силы F рассматривается ударный импульс
I - момент инерции однородного шара относительно любой оси проходящей через центр масс.
- момент ударного импульса относительно центра.
d - плечо силы относительно центра масс - кратчайшее расстояние от данной точки (центра) до линии действия силы, т. е. длина перпендикуляра, опущенного из этой точки на линию действия силы
[центр масс однородного шара – центр симметрии шара - центр шара]
Поступательная и вращательная скорости шара за время контакта кия с шаром увеличиваются от нуля до тех скоростей с которыми начинает двигаться биток сразу после удара (V и ω).
--- - отношение вращательной скорости относительно центра (линейная скорость вращения точки опоры) к поступательной.
Вращение вокруг неподвижной точки можно свести к трем независимым вращениям вокруг трех взаимно перпендикулярных осей - главных осей инерции.
Для шара направления главных осей инерции может быть выбрано произвольно - любая тройка взаимно перпендикулярных осей с началом в центре масс. Все три главных момента инерции совпадают: Оси системы координат Охyz, связанной с центром масс шара и совершающей поступательное движение вместе с ним, будут главными осями инерции.
Момент силы относительно центра складывается из моментов этой силы относительно трех взаимно перпендикулярных осей. (Любой вектор в трехмерном пространстве можно разложить единственным образом по любым трем некомпланарным векторам.)
(.) O - начало декартовой системы координат - центр шара.
Момент силы относительно оси - проекция на эту ось момента силы относительно любой точки на оси – алгебраический момент проекции силы на плоскость, перпендикулярную к оси, относительно точки пересечения оси с этой плоскостью (O1).
Момент силы относительно оси будет иметь знак плюс, когда с положительного конца оси тело под действием заданной силы представляется вращающимся вокруг оси против хода часовой стрелки, и знак минус - когда по ходу часовой.
-
Поместим начало координат в центр шара ((.)O).
-
- расстояние от точки удара до координатной плоскости YZ.
Регулировка параметра позволяет придавать боковое вращение (правый/левый винт).
Изменение параметра определяет изменение момента силы F, действующей на тело, относительно оси вращения z [].
- плечо силы относительно оси z. -
- расстояние от точки удара до координатной плоскости XY.
Регулировка параметра позволяет придавать верхнее/нижнее вращение (накат/оттяжка).
Изменение параметра определяет изменение момента силы F, действующей на тело, относительно оси вращения x - [].
- плечо силы относительно оси x (при ударе горизонтальным кием). -
При ударе горизонтальным кием (угол наклона бильярдного кия равен нулю) момент силы F, действующей на тело,
относительно оси вращения y ()
не возникает.
[Момент силы относительно оси равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси.]
Также, не возникает, если линия действия силы лежит в вертикальной плоскости, проходящей через центр шара. То есть a=0. [Момент силы относительно оси равен нулю, если линия действия силы пересекается с осью. В этом случае равно нулю плечо силы.] Удар горизонтальным кием - плечо силы относительно оси X
- сила параллельна оси Y
- плечо силы относительно оси Z
Изменение угла наклона кия (∠θ) определяет изменение момента силы F, действующей на тело, относительно оси вращения y - , относительно оси вращения x - и относительно оси вращения z - . Удар наклонным кием (∠θ - угол наклона кия) Удар наклонным кием - плечо силы относительно оси X
- плечо силы относительно оси Y
- плечо силы относительно оси Z
θ - угол наклона кия (рад.)
[Координатные оси удобно взять так, что направление движения центра шара совпадает с положительным направлением оси Y, ось X - проведенная горизонтально перпендикулярно оси Y, ось Z - вертикально вверх. Координаты x и y лежат в поверхности, z перпендикулярно поверхности.] ➤ D(x,y,z) O X Y Z a b Положение материальной точки данной системе отсчета определяется ее координатами или радиус-вектором.
Радиус-вектор материальной точки – вектор, начало которого находится в начале координат этой системы, а конец – в месте расположения материальной точки.
Декартовыми прямоугольными координатами точки D в трехмерном пространстве называются взятые с определенным знаком расстояния (выраженные в единицах масштаба) этой точки до трех взаимно перпендикулярных координатных плоскостей (XY,XZ,YZ) или, что то же, проекции радиус-вектора точки D на три взаимно перпендикулярные координатные оси.
(x,y,z)
; ;
В зависимости от взаимного расположения положительных направлений координатных осей возможны левая и правая координатные системы. Как правило, пользуются правой координатной системой. Точка удара (точка приложения силы) задает две координаты: и - координаты по осям OX и OZ соответственно:
- радиус шара
Удар горизонтальным кием (∠θ=0 - угол наклона бильярдного кия равен нулю)
-
Момент силы относительно оси: (x,y,z)
- провести плоскость H, перпендикулярную оси - в любом месте.
- спроецировать силу на эту плоскость и найти
- опустить из точки пересечения оси с плоскостью (O1) перпендикуляр на линию действия силы и найти длину .
- вычислить произведение модуля проекции силы на плечо
- определить знак момента:
Момент считается положительным, если проекция силы на плоскость, перпендикулярную к оси, стремится вращать тело вокруг положительного направления оси против движения часовой стрелки, и отрицательным, если она стремится вращать тело по движению часовой стрелки

Ось Y - по направлению движения шара, ось X перпендикулярно ей в горизонтальной плоскости, ось Z - вверх, перпендикулярно плоскости OXY.
и - координаты по осям OX и OZ соответственно
Если бы точка приложения силы находилась ниже центра масс:
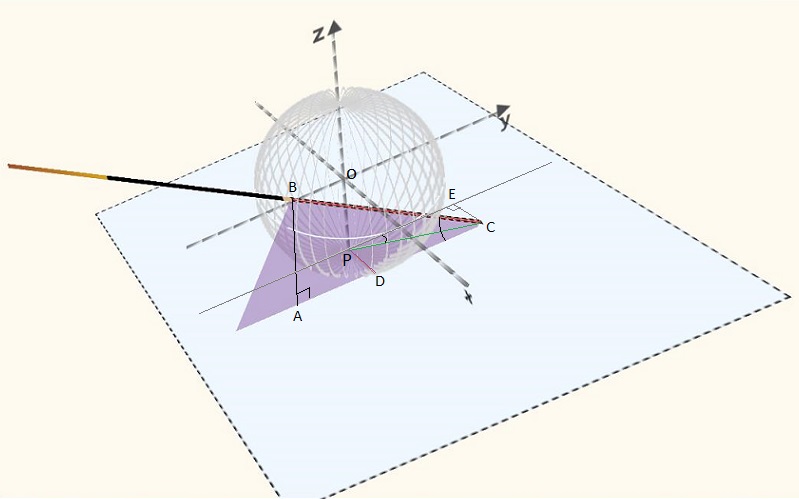
Рассмотрим случай когда точка приложения силы находится выше центра масс, линия дествия силы проходит ниже центра масс (Рис.1)
Details
Details
Можно найти другим способом:Рассмотрим ΔCDG.
- точка приложения силы находится выше центра масс, линия дествия силы проходит ниже центра масс ()
- точка приложения силы находится выше центра масс, линия дествия силы проходит выше центра масс ()
- точка приложения силы находится ниже центра масс ()
Если ∠θ=0 - горизонтальный кий, то:
 (x,y,z)
a
b
R
θ (
(x,y,z)
a
b
R
θ (
x,y,z - координаты точки приложения силы
, , - проекции силы на координатные оси
Details
[точка O - центр шара - начало декартовой системы координат]
Если рассмотреть точки удара на другой (дальней от нас) стороне от центрального сечения шара, тогда
Для этого надо рассмотреть удар горизонтальным кием в пределах зоны кикса (т.е круга радиуса 0,57*R), а пототом просто повернуть шар вокруг оси X по часовой стрелке на желаемый угол наклона кия.
- X: dx=|b1|
- Y: dy=|a|
- Z: dz=|a|
Матрица поворота (вокруг оси OX):
Угол поворота: -θ (поворот по часовой стрелке)
Тогда:
Details
[точка O - центр шара - начало декартовой системы координат]
→ угол наклона кия (∠θ) имеет верхний предел → →
Если b1>0, т.е. линия действия силы проходит выше центра масс:
Если b1<0, т.е. линия действия силы проходит ниже центра масс:
- ударный импульс (импульс ударной силы)
В бильярде плечо силы относительно центра шара называют - tip offset - расстояние между центром битка и линией проходящей через точку удара параллельно направлению движения кия.
Данная величина ограничена зоной кикса (≈0,57R)
Для заданной точки удара (a,,b) угол наклона кия (∠θ) изменяется в пределах:
Отсюда видно, что чем ниже точка удара относительно центра (b<0), тем меньше ∠θ для того, чтобы не получился кикс.
Или наоборот, чем больше наклон кия (∠θ), тем выше находятся точки на шаре в которые можно ударить без кикса (если смотреть с фронтальной проекции)
Для того, чтобы получить зону кикса необходимо представить сечение шара радиуса 0.57R
во фронтальной плоскости проекций и затем мысленно повернуть шар вокруг оси OX
на угол наклона кия.
Фронтальная плоскость проекций - плоскость, которая расположена вертикально и
перпендикулярно взору наблюдателя
Как говорят в бильярде - "поднимая" кий (подъем турняка кия, т.е наклон кия) также "поднимаешь" зону кикса.
Так как при ударе нет скольжения кия по шару, частицы шара, получившие удар кием, сцепляются с кием и, пока продолжается соприкосновение, не могут иметь скоростей, отличных от скоростей ударяющих точек кия.
Такое "сцепление" при котром поверхности не дают друг другу скользить называется силой статического трения или силой трения покоя.
Силу трения покоя обычно называют силой сцепления, чтобы отличать от силы трения покоя, возникающей при контакте тел, не способных катиться. Силу трения покоя также называют статическим трением. Статическое трение — это сила, удерживающая объект в покое и препятствующая его движению, действующая до тех пор, пока приложенная сила не превысит силу статического трения. Кинетическое трение, также известное как трение скольжения или движущееся трение, действует на объект, когда он находится в движении.
Статическая сила трения колеблется от нуля до своего максимального предела, который является предельным трением. Предельное трение — это сила трения, приложенная в тот момент, когда тело собирается двигаться. Его формула выглядит следующим образом: ,
где: - предельное трение; - коэффициент статического трения; - сила нормальной реакции.
Коэффициент трения равен тангенсу угла трения. Тангенс угла трения иногда коротко называют тангенсом трения.
Угол трения (∠α) - угол между силой (полная реакция поверхности - ударный мспульс) и нормалью к опорной поверхности.
Тело приходит в движение, когда внешняя сила равна предельной силе трения. И если внешняя сила превышает предельное трение, тело начинает двигаться.
Таким образом, если линия удара находится на таком расстоянии от центра шара, что линия действия силы (линия удара) образует угол с нормалью к поверхности шара превосходящий угол трения, то будет иметь скольжение конца кия по шару во время удара. Такой удар не будет верным.
Угол трения:
Сцепление между кием и шаром во время удара, приводит к тому, что количество движения, полученное шаром, всегда имеет направление скорости кия, а эта скорость не меняет заметно своего направления во время удара.
| x | y | z | x | y | z | x | y | z |
| -17 | 50 | 4 | 0 | 0 | 0 | -90 | 0 | 0 |
| Вращать: | ||
|---|---|---|
| x | y | z |
- координаты точки приложения силы
(.) O - центр шара; ∠ θ - угол наклона кия
Поместим в (.) O начало системы координат. [Координатные оси удобно взять так, что направление движения центра шара совпадает с положительным направлением оси Y, ось X - проведенная горизонтально перпендикулярно оси Y, ось Z - вертикально вверх. Координаты x и y лежат в поверхности, z перпендикулярно поверхности.]
Тогда:
∠ α - угол наклона мгновенной оси вращения к плоскости OXY (в момент времени t).
∠ α - угол наклона мгновенной оси вращения к плоскости OXY (сразу послу удара кием).
∠ β - угол наклона мгновенной оси вращения к плоскости OXZ (сразу послу удара кием).
, , - угловые скорости относительно осей X,Y,Z сразу после удара кием.
То есть либо ∠ θ=0 (кий горизониальный); либо - то есть удар в вертикальной плоскости происходящей через центр шара, то ∠ β=0
При ударе горизонтальным кием в какой бы точке шара не был нанесен удар кием, ось вращения всегда лежит в плоскости перпендикулярной направлению поступательного движения, т.е в плоскости, образуемой осями X и Z. Ось вращения перпендикулярна направлению поступательного движения. [,,]
При ударе наклонным кием, если вертикальная плоскость удара не проходит через центр шара, т.е. при ударе наклонным кием с боковой составляющей винта, ось вращения не перпендикулярна направлению поступательного движения. [,,]
- ударный импульс
[ - горизонтальная составляющая в поступательном движении шара]
- Рассмотрим некоторые правила (секреты) бильярда:
- Удары наклейкой кия в точки на битке на линии исходящей из точки касания битка с сукном (точка опоры) приводят к качению с одним и тем же наклоном оси вращения, разница будет только в длине начальной фазы скольжения битка по сукну.
(.) C лежит на прямой исходящей из точки опоры (.) D под углом ξ к оси OZ (ось OY направлена от нас по линии кия) внутри отрезка AB, ограниченного зоной кикса.
(.) O - центр шара. R - радиус шара.
При вращении луча по часовой стрелке считается, что его угол поворота отрицательный, т.е. луч вращается в отрицательном направлении.
[Т.е если (.) С правее (.) O (центр), то: ∠ξ<0; если (.) С левее (.) O (центр),то: ∠ξ>0]
где , - угловые скорости относительно осей OZ,OX к моменту финального качения шара.
Как известно, момент финального качения шара наступает когда линейная скорость вращения опорной точки () равна и прямо противоположна поступательной скорости центра шара ().
Как известно, финальная скорость шара (скорость к моменту финального качения) образуется на от вектора начальной поступательной скорости () и на от вектора противоположного вектору начальной линейной скорости вращения опорной точки ()
где , - поступательная и угловая вращательная скорости (относительно оси OX) шара сразу после удара кием.
Моментом верчения, можно пренебречь по сравнению с моментом трения скольжения.
Тогда, принимая во внимание: , имеем:
Из этого следует еще одно правило бильярда - для того, чтобы донести максимальный боковой винт до далекого ПШ бить нужно не с максимальным боковиком, а с максимальным нижне-боковым винтом.
Но при этом удар в верхние точки будет с большим плечом силы относительно оси Z (), чем удар в нижние точки. Увеличение плеча () даст большее угловое отклонение битка (squirt), что нежелательно. Поэтому если позволяет расстояние до ПШ, то лучше наносить удар в нижние точки (по линии), добавив силу удара. То есть результат удара в верхнюю точку по линии (с большим смещением от центра битка) и более сильного удара в нижнюю точку на линии (с малым смещением от центра битка) будет одинаков. Разница будет только в длине фазы скольжения битка по сукну, и в величине эффекта сноса. Но, здесь надо отметить, что для того, чтобы это правило работало биток к моменту соударения с ПШ должен достигнуть состояния качения. Поэтому возможность удара в нижние точки (по линии) ограничена расстоянием до ПШ. При более низком и сильном ударе фаза скольжения битка удлиняется и шар может не успеть перейти в качение к моменту соударения с ПШ.
Два рода трения: трение скольжения - проявляется когда шар скользит по сукну бильярда (переменное движение) и трение качения в финальном состоянии движения шара (финальное движение). Будем считать контакт точечным - трением верчения можно пренебречь. Трение скольжения действует противоположно скорости скольжения по сукну опорной точки шара. Скорость скольжения опорной точки шара обладает двумя скоростями поступательного и вращательного движения.
Вектор линейной скорости вращения () точки равен векторному произведению вектора угловой скорости () и радиус-вектора точки ().
Вектор линейной скорости вращения () точки складывется из векторов , , . , где - радиус-вектор, проведённый из центра шара в точку.
В данном случае рассматриваем точку касания с плоскостью - точку опоры (т.е точку где приложена сила трения).
, так как радиус вектор коллинеарен .
Вектор направлен по оси OY.
Вектор направлен по оси OX.
Таким образом, если , то вектора линейной вращательной и поступательной скоростей точки опоры будут коллинеарны: т.е. при ударе горизонтальным кием (∠ θ=0), или при ударе в вертикальной плоскости, проходящей через центр шара (). В этом случае движение шара будет прямолинейным.
Если , то вектора линейной вращательной и поступательной скоростей точки опоры не будут коллинеарны: т.е при ударе наклонным кием с боковой составляющей винта. Вектор скорости скольжения (сумма векторов поступательного и вращательного движений), а следовательно и вектор силы трения, а следовательно и вектор ускорения будут направлены под углом к скорости поступательного движения. В этом случае движения шара будет криволинейным (параболическим).
Если при наклонной линии удара вертикальная плоскость удара не проходит через центр, то шар вначале опишет часть параболы переменным движением, после чего он перейдет в финальное состояние качения, следуя по касательной к этой кривой. Направление этой касательной нисколько не зависит от величины трения между бильярдным сукном и шаром.
Финальный угол отклонения шара равен:
,
, - проекции начальной поступательной скорости [горизонтальная составляющая в поступательном движении шара] (сразу после удара кием) на оси OX, OY.
, - начальные угловые скорости вращения (сразу после удара кием) относительно осей OX, OY.
Учтем, что (без учета squirt - угловое отклонение 2-3 градуса).
- Если линия действия силы (BC) проходит ниже центра масс (O) → тогда вращение относительно оси OX - обратное (нижнее) → [для правой системы координат] →
- Если линия действия силы (BC) проходит выше центра масс (O) → тогда вращение относительно оси OX - прямое (верхнее) → [для правой системы координат] →
В данном случае для дальнейшего анализа знак ∠δ роли играть не будет.
(.) B имеет координаты ( ; ; )
∠ BCA= ∠θ - угол наклона кия
PE=DC
AC=AD+DC; DC=AC-AD;
- Если линия действия силы (BC) проходит ниже центра масс (O) →
тогда вращение относительно оси OX - обратное (нижнее) →
плечо силы относительно оси OX:
→
-
Если линия действия силы (BC) проходит выше центра масс (O) →
тогда вращение относительно оси OX - прямое (верхнее) →
плечо силы относительно оси OX:
→
Таким образом, финальное направление движения шара будет параллельно линии, идущей от его точки опоры к той точке, в которой линия удара пересекает плоскость бильярдного сукна.
На основании этого - если линия удара пересечет плоскость бильярда по эту сторону опорной точки, то шар должен будет пойти назад, двигаясь в направлении, противоположном направлению начальной скорости.
Рассмотрим удар, когда вертикальная плоскость удара проходит через центр. То есть при ударе отсутствует боковая составляющая винта (, ).
В данном случае движение будет прямолинейным.
При ударе кием, когда линия проходит ниже центра шар начинает скользить, вращаясь в обратном направлении.
-
В дальнейшем возможны 3 случая:
-
Может случиться так, что поступательное движение шара будет остановлено
в тот момент, когда он еще сохранит обратное вращение.
Далее сила трения начнет ускорять шар в обратном направлении. Ставшее уже прямым (по направлению движения шара) вращение уменьшается, увеличивая при этом поступательную скорость Ускорение это прекратиться, когда исчезнет тенденция к проскальзыванию (т.е. поступательная и вращательная скорости точки опоры будут равны по модулю и противоположны по направлению). После чего шар перейдет в финальное состояние качения.
То есть, в данном случае изменится направление поступательного движения
--- - Может случиться так, что поступательное движение шара и обратное вращение шара будут остановлены одновременно. Тогда шар остановится и фаза качения не наступит.
-
Может случиться так, что раньше будет остановлено обратное вращение и тогда шар
сохранит поступательное движение вперед, изменив направление вращения на прямое (верхнее).
То есть, в данном случае изменится направление вращательного движения
[без учета небольшого углового отклонения squirt - 2-3°]
- вращательная скорость (линейная скорость вращения) [точки опоры]
,
- время скольжения
- относительная скорость скольжения (вектор)
- проекция на ось X
- проекция на ось Y
- ускорение поступательного движения - проекция на ось Y
- линейное ускорение вращательного движения - проекция на ось Y
- ускорение поступательного движения - проекция на ось Y
- линейное ускорение вращательного движения - проекция на ось Y
Если будет меньше нуля, то - наоборот.
Таким образом, получаем первое неравенство:
-----
Второе неравенство - это ограничение зоны кикса:
Таким образом данная система двух неравенств охватывает все три случая.
При заданном наклоне кия (∠θ) из множества точек с координатами (, , ) [( 0, , ) - если вертикальная плоскость удара проходит через центр шара], ограниченных вторым неравенством (зоной кикса) -
знак первого неравенства разграничит три описывемых случая.
- знак> - первый случай,
первым будет остановлено поступательное движение [проекция по оси Y] - шар пойдет назад
Если вертикальная плоскость удара проходит через центр шара.
- знак= - второй случай, поступательное и вращательное движения будут остановлены одновременно - шар остановится
- знак< - третий случай, первым будет остановлено обратное вращение - шар пойдет вперед
Проведем прямую из опорной точки P под углом ∠α на расстоянии от точки O (центра шара).
AP - линия действия силы.
- плечо силы
∠θ - угол наклона кия; OP=R
Отсюда видно, что →
если линия удара пересечет плоскость бильярда по эту сторону опорной точки, то при заданном (<0.57R) ∠θ будет увеличиваться, уменьшаться →
если линия удара пересечет плоскость бильярда по ту сторону опорной точки, то - наоборот.
Для ударов горизонтальным кием - подскока нет, так как отсутствует вертикальная составляющая в поступательном движении шара.
При ударе по битку наклонным кием, помимо горизонтальной составляющей в поступательном движении шара, возникает вертикальная составляющая, вызванная упругой реакцией плиты стола на кратковременное повышение давления на нее в момент удара.
Для ударов наклонным кием, где угол наклона кия и/или сила удара невелики подскок шара незначительный, и его влиянием можно пренебречь.
В иных случаях, т.е при ударах наклонным кием, где угол наклона кия и/или сила удара достаточно велики, это влияние необходимо учесть.
В этом случае движение шара разбивается на две фазы: период, когда шар находится в воздухе (фаза полета) и фаза удара о поверхность.
Пусть, i=0 - 0-вое "падение", т.е удар наклонным кием.
- начальная поступательная скорость, приданная шару ударом кия (направлена под углом вниз).
- начальная уговая скорость вращения относительно оси X
- начальная уговая скорость вращения относительно оси Y отсутствует.
- угол наклона кия.
Фаза полета: Движение шара в этой фазе можно представить в виде суммы равномерного движения в горизонтальном направлении (если пренебречь сопротивлением воздуха, то на шар в горизонтальном направлении не действуют никакие силы) и равнопеременного движения в вертикальном направлении. Шар сначала взлетает, а потом падает и движение в вертикальной плоскости является сначала равнозамедленным (с ускорением -g), а потом равноускоренным (с ускорением g). В высшей точке полета вертикальная составляющая скорости обращается в ноль.
Величина скорости i-го отскока равна скорости (i+1)-го падения; угол i-го отскока равен углу (i+1)-го падения.
Движение шара в этой фазе описывается следующими уравнениями:
Вертикальная составляющая скорости в момент времени t:
Координата y в момент времени t:
Координата z в момент времени t:
Высота подъема в высшей точке i-го полета:
Расстояние вдоль оси OY за время i-го полета (дальность i-го полета):
Время полета i-го полета:
- скорость шара сразу после i-го отскока и соответственно в момент i+1 падения.
- угол i-го отскока и соответственно i+1 падения.
Вращение шара не изменяется за время полета.
- угловая скорость шара относительно оси X в конце i-го отскока и соответственно i+1 падения.
С увеличением угла наклона кия высота полета увеличивается;
С увеличением силы удара (скорости шара) высота и длина полета увеличиваются
Например, чтобы ограничить длину полета, не уменьшая высоты полета можно увеличить угол наклона кия и уменьшить силу удара.
Скорость () и угол отскока () , в свою очередь, зависят от силы удара, угла наклона кия и характера вращения шара.
На практике, высоты 1-2 диаметра шара соответствуют наклону кия в диапазоне от 30° до 50°.]
В теории удара в качестве меры взаимодействия тел рассматривают не сами ударные силы, а их импульсы.
Ударная сила быстро возрастает от нуля в момент начала удара до максимального значения, затем так же быстро уменьшается обычно по другому закону до нуля в конце удара. Во многих случаях не требуется детального знания закона изменения ударной силы.
Применение законов сохранения энергии и импульса во многих случаях позволяет исключить из рассмотрения сам процесс столкновения и получить связь между скоростями тел до и после столкновения, минуя все промежуточные значения этих величин.
В данном случае достаточно рассмотреть ударные импульсы.
Изменение количества движения материальной точки за время удара равно ударному импульсу, приложенному к точке.
Проекции скорости материальной точки на оси координатной системы: Горизонтальная (тангенциальная) составляющая скорости в начале i-го удара:
Вертикальная (нормальная) составляющая скорости в начале i-го удара:
Составляющая скорости вдоль нормали при ударе меняет направление на противоположное.
Коэффициент восстановления (e) характеризует, насколько восстанавливается нормальная составляющая скорости после удара.
В конце удара нормальная составляющая скорости составит:
Изменение импульса тела равно импульсу силы, действующей на него.
Разложим ударный импульс реакции поверхности на нормальную (вертикальную) и тангенциальную (горизонтальную, касательную) составляющие.
Нормальная составляющая (импульс силы нормальной реакции за время удара):
Тангенциальная составляющая (импульс силы трения за время удара): - при условии, что сила трения скольжения действует в течение всего времени удара
Однако сила трения скольжения действует только до тех пор, пока у шара есть ненулевая компонента относительной скорости вдоль поверхности.
-
При начавшемся в начале удара скольжении шара сила трения одновременно начинает:
- изменять горизонтальную компоненту поступательной скорости
- изменять вращательную скорость шара Как только эти скорости сравняются по модулю и будут противоположны по направлению скольжение прекратится, далее шар просто катится.
- Если шар движется вперед с обратным вращением, то скорости поступательного и вращательного движений будут сонаправлены. Угловая скорость шара после удара уменьшится, как и его горизонтальная скорость, и шар поднимется вверх, возможно, даже превысив свою первоначальную высоту. Также возможно, что шар начнёт вращаться в противоположном направлении и даже отскочит назад.
- Если шар движется вперед с прямым вращением, скорости поступательного и вращательного движений будут направлены в противоположные стороны. Что именно произойдёт, зависит от того, какой из двух компонентов доминирует.
-Если шар вращается быстрее, чем движется поступательно, то относительная скорость скольжения будет направлена в сторону скорости вращательного движения. А соответственно сила трения (ускорение) в сторону скорости поступательного движения. Угловая скорость шара после удара уменьшится, но его горизонтальная скорость увеличится. Шар будет двигаться вперёд, но не превысит своей первоначальной высоты и продолжит вращаться в том же направлении.
- Если шар движется поступательно быстрее, чем вращается, то относительная скорость скольжения будет направлена в сторону скорости поступательного движения. А соответственно сила трения (ускорение) в сторону скорости вращательного движения. Угловая скорость шара после удара увеличится, но его горизонтальная скорость уменьшится. Шар не превысит свою первоначальную высоту и продолжит вращаться в том же направлении.
Таким образом,
- Если параметры удара такие,что за время i-го удара сила трения не успевает остановить скольжение, то:
-
Сила трения сообщает шару ускорение поступательного движения (F=m*a):
За время i-го удара тангенциальная составляющая поступательной скорости () изменится на величину: -
Сила трения создает момент силы, собщающий шару угловое ускорение (M=F*R=I*ε):
За время i-го удара угловая вращательная скорость () изменится на величину: ()
или линейная (тангенциальная) скорость вращательного движения () изменится на величину:
-
В случае оттяжки (обратного вращения - поступательная и линейная вращательная скорости сонаправлены):
-
В случае скользящего наката (поступательная и линейная вращательная скорости противоположно направлены;
поступательная скорость больше вращательной):
-
В случае буксующего наката (поступательная и линейная вращательная скорости противоположно направлены;
поступательная скорость меньше вращательной):
-
Сила трения действует на шары, пока у шаров есть ненулевая компонента скорости.
Условие прекращения скольжения за время удара: относительная скорость скольжения должна обратиться в нуль до конца удара. В этом случае относительное движение тел в точке контакта прекращается, а сила трения скольжения перестает действовать.
Если параметры удара такие,что за время i-го удара сила трения успевает остановить скольжение, то сила трения скольжения перестает действовать.
Как известно, финальная скорость шара (скорость к моменту финального качения) образуется на от вектора начальной поступательной скорости () и на от вектора противоположного вектору начальной вращательной скорости ()
Таким образом, если (в случае обратного вращения / скользящего наката),
(в случае буксующего наката),
то
Уменьшатся/увеличатся поступательная/вращательная скорости зависит от направления силы трения.
Угол отскока:
Если начальные параметры удара таковы, что на шаре есть вращение относительно оси Y (вращение массе).
Тогда, начальные параметры:
- начальная уговая скорость вращения относительно оси X
- начальная уговая скорость вращения относительно оси Y.
Тогда движение шара в горизонтальной плоскости (OXY) нужно рассмотреть как сумму движений по осям OX и OY. Начальные параметры будут:
-
по оси X:
-
по оси Y:
- - угол наклона кия.
-
В результате вращения тела вокруг оси Y возникает линейная скорость точки опоры
(), направленная в каждый момент времени
по касательной к окружности вращения, т.е вдоль оси X;
сила трения от этого вращения разгоняет шар по оси X;
движение в плоскости OXY складывается из движений по осям X и Y;
тем самым тангенциальная (горизонтальная) составляющая поступательной скорости не коллинеарна оси Y.
α1 - угол между вектором тангенциальной составляющей поступательной скорости и осью Y. -
вектора линейной вращательной скорости и тангенциальной составляющей поступательной скорости
точки опоры шара не коллинеарны.
Поэтому сила трения, направление которой противоположно результирующей скорости скольжения
точки опоры шара (сумма векторов поступательного и вращательного движений) образует
некоторый угол с направлением начального движения.
Этот угол при движении шара остается постоянным, а относительная скорость скольжения
за время скольжения упадет до нуля; после чего переменная фаза движения шара закончится -
скольжение прекратится и шар перейдет в финальное состояние качения.
α2 - угол между вектором относительной скорости скольжения и осью Y.
[Углом между двумя векторами, отложенными от одной точки, называется кратчайший угол, на который нужно повернуть один из векторов вокруг своего начала до положения сонаправленности с другим вектором.
Угол между векторами может быть положительным или отрицательным. Положительный угол соответствует "повороту" против часовой стрелки от первого вектора ко второму. Отрицательный угол, наоборот, соответствует "повороту" по часовой стрелке]
На шаре обратное (нижнее) вращение () плюс правое боковое вращение ().
[Т.е. удар наклонным кием ниже центра масс шара с правым боковиком]
ось OY:
Нормальная составляющая поступательной скорости:
- проекция скорости ;
- проекция скорости ;
; ;
по оси OY:
Существенный наклон кия (>20°) в бильярде применяют для выполнения двух видов ударов - массе и перескока (джамп-удар).
-
Основное различие этих ударов заключается в следующем:
-
Наличие боковой составляющей винта
При джамп-ударах наклонным кием ударяют таким образом, чтобы ось кия находилась
в вертикальной плоскости удара, проходящей через центр.
(Как правило, ось кия проходит через центр шара или несколько ниже (для существенных наклонов)).
Наличие боковой составляющей нежелательно, так как шар отклоняется от прямолинейной траектории в сторону примененного бокового винта.
Боковая составляющая винта при выполнении ударов массе - ключевой фактор.
Удар массе можно рассматривать как комбинацию вращений вокруг 3-х осей: вращения вокруг горизонтальной оси (расположенной поперек направления поступательного движения шара) - прямое/обратное вращение, вращения вокруг вертикальной оси - боковое вращение, вращения вокруг горизонтальной оси (расположенной по направлению поступательного движения шара) - вращение массе. Этот последний тип вращения (массе) приводит к искривлению траектории движения шара. Направление силы трения скольжения, возникающей от вращения массе не совпадает с направлением поступательного движения и поэтому эта сила искривляет траекторию движения шара, пока шар не перестанет скользить и не покатится по прямой в новом направлении.
То есть, когда исполняется джамп-удар цель - перепрыгнуть препятствие; когда исполняется массе цель - обойти препятствие по дуге. - Выраженность фазы подскоков шара При исполнении массе подскоки шара нежелательны. Подскоки влияют на траекторию шара, несмотря на то,что направление финальной траектории практически не изменяется. (параллельно линии, идущей от точки опоры шара к той точке, в которой линия удара пересекает плоскость бильярдного сукна) Изменение формы кривой в фазе скольжения связано с тем, что шар за время подскоков в большей степени теряет поступательную (тангенциальную составляющую - ) и вращательную скорости (, ) чем если бы шар скользил все это время не отрываясь от земли. Эти существенные потери происходят во время ударов шара о поверхность.
Details
Время полета i-го полета:
Ускорение поступательного движения в случае, когда шар скользит не отрываясь от поверхности:
За время полета i-го полета, в случае если бы шар все это время скользил без отрыва от поверхности, импульс силы трения составит:
Таким образом, можно сравнить:
^
; ; , где e - коэффициент восстановления.
^
^
Воздействие кия на биток выражается исключительно в передаче импульса, которая происходит в период времени их контакта. При ударе кием по битку происходит двойной удар: один между кием и шаром, другой между шаром и поверхностью стола. Под действием вертикальной составляющей ударного импульса происходит взаимодействие между шаром и поверхностью стола.
Поэтому для таких ударов - важно время контакта наклейки кия с битком. Для массе - чем дольше, тем лучше. За это время шар оказывается "зажатым" между кием и столом, тем самым частично "погашая" вертикальную составляющую ударного импульса. Для джамп-ударов - наоборот. То есть кий передаст шару большую часть ударного импульса до того, как начнется взаимодействие между шаром и поверхностью стола. Кий должен не мешать. Для реализации этих целей используют специальные кии, предназначеные для выполнения джамп-ударов и ударов массе. Также есть особенности в технике удара.
Джамп-удар, как правило, выполняется специальным облегченным кием и резким движением с свободным расслабленным хватом с таким расчетом, чтобы под действием силы отдачи кий сразу же оскочил назад, не сталкиваясь повторно с подпрыгнувшим битком. Малый вес кия позволит легче разогнать кий, а также легче отражаться от битка, чтобы не создавать помех движению битка.
Твёрдость материала битка много больше твёрдости материалов кия, в том числе и наклейки, а значит время контакта определяется в значительно большей степени временем деформации кия, чем битка. Следовательно, время контакта между кием и наклейкой можно варьировать изменяя только упругость материалов кия. По степени жесткости наклейки кия делятся на мягкие, средние и твердые. Твердые, как и следует из названия, более жесткие. Мягкие, наоборот, очень хорошо держат мел, дольше контактируют с шаром при ударе, благодаря чему позволяют выполнять более сложные удары с вращением При выполнении массе особенно важно обеспечить надежный контакт наклейки с битком и устойчивое направление движения кия. Cпециальные кии, предназначеные для массе ударов тяжелее чем стандартные; имеют мягкий тип наклейки; имеют большую площадь рабочей поверхности наклейки.
Специальные кии, предназначеные для джамп ударов легче чем стандартные; имеют жесткий тип наклейки; имеют меньшую площадь рабочей поверхности наклейки.
2 - такой же удар с выраженной фазой подскока шара.
Для ударов массе важно ограничить подскоки шара и приблизить траекторию к траектории 1.
-
Одинаковые финальные направления можно задавать с разной комбинацией
- (.) удара с координатами (a,y,b)
- и угла наклона кия (∠θ).
Очевидно, что чем больше a и меньше b, тем меньше требуемый наклон кия для данного финального направления]
Так как "лишний" наклон кия нежелателен, то задача сводится к тому, чтобы найти такие координаты (.) удара в пределах зоны кикса, которые обеспечивали бы требуемое финальное направление () и при этом наклон кия был бы минимальным из возможных.
,
где , , - плечо силы относительно осей X,Y,Z.
- зона кикса
∠α - угол между финальным направлением шара и осью Y (желаемое финальное направление шара)
∠θ - угол наклона кия, обеспечивающий желаемое финальное направление шара при заданной (.) удара
| № | α | θ |
|---|---|---|
| 1 | 20° | 26° |
| 2 | 40° | 43° |
| 3 | 60° | 52° |
| 4 | 80° | 55° |
(Если смотреть сверху, поднимая зону кикса на соответсвующий угол θ)
Отсюда становится понятным еще одно правило бильярда. Удары массе лучше выполнять на предельных винтах (ближе к границе зоны кикса), выбирая траекторию битка изменением силы удара и наклона кия. В этом случае, подскок битка при ударе будет минимальным, и его влияние на траекторию битка можно не учитывать.
Чем быстрее растет или убывает функция (чем круче ее график), тем больше по модулю ее производная.
Соответственно, чем больше изменение по y и меньше изменение по x в единицу времени, тем более крутой будет дуговая траектория шара при оттяжке.
Соответственно, чем больше угол наклона силы трения к оси x и меньше к оси y, тем более крутой будет траектория оттяжки шара.
Наклон силы трения к оси x зависит от соотношения вращательной и поступательной скорости
Также будет меньшим и количество вращения на битке к моменту соударения с ПШ. Связано с тем, что шар за время подскоков (ударов о поверхность) в большей степени теряет поступательную и вращательную скорости, чем если бы шар скользил все это время не отрываясь от земли.
Details
Надо отметить, что больший SRF-фактор при наклонной оттяжке по сравнению с ударом горизонтальным кием с теми же параметрами (сила удара и плечо силы) достигается при углах наклона кия более 20 и величине плеча, близкой к предельному значению (0.5R).Зависимость SRF-фактора при наклонной оттяжке от угла наклона.
Для сравнения SRF-фактор при ударе горизонтальным кием.
Если сила удара и плечо силы одинаковы и при ударе наклонным кием и при ударе горизонтальным кием, то эти скорости будут идентичны в обоих случаях. С той разницей, что в случае удара наклонным кием поступательная скорость будет направлена под углом (θ) к плоскости движения шара.
; ;
[При условии, что шар скользит в течение всего периода отскока. В обратном случае на шаре уже не обратное, а прямое вращение.]
В остальном, для хорошей оттяжки удар горизонтальным кием предпочтителен. Поэтому, в бильярде соответствуют для хорошей оттяжки наносить удар горизонтальным кием ниже центра немного недоходя до границы зоны кикса.
В случае удара горизонтальным кием SRF-фактор будет увеличиваться при увеличении плеча силы (d), и наоборот.
-
Удар в системе (кий-шар) описывается тремя уравнениями:
- закон сохранения энергии
- закон сохранения импульса
- коэффициент восстановления энергии
- кинетическая энергия до удара
- кинетическая энергия после удара
, - массы кия и шара.
, - скорости кия до удара и после удара.
- поступательная скорость шара после удара
- момент инерции шара относительно любой оси, проходящей через центр масс
- угловая скорость шара относительно мгновенной оси (сразу после удара), проходящей через центр масс.
где d - плечо силы (ударный импульс) относительно центра масс шара (расстояние от мгновенной оси вращения [сразу после удара] до центра масс шара)
2) закон сохранения импульса:
Изменение импульса тела при действии на него силы равно импульсу этой силы
3) коэффициент восстановления энергии:
Коэффициент восстановления энергии характеризует потери механической энергии соударяющихся тел вследствие появления в них остаточных деформаций и их нагревания.
Коэффициент восстановления энергии равен отношению суммарной кинетической энергии после удара к их кинетической суммарной энергии до удара.
Решая это квадратное уравнение по :
,
где d - плечо силы относительно центра масс шара (расстояние от оси вращения до центра масс шара)
В то время как зависимость вращательной скорости от плеча силы (точки удара) при заданной скорости кия - не линейная. Данная функция сначала возрастает, принимает наибольшее значение, а потом убывает.
Тогда взяв производную по и приравняв производную к нулю можно найти плечо силы относительно центра масс при котором вращательная скорость будет максимальна при заданной скорости кия.
Этот показатель () составляет 0.5, то есть очень близкий к границе кикса.
Отсюда следует, что для того, чтобы увеличить вращательную скорость при ударе надежнее наносить удар на небольшом расстоянии от границы зоны кикса, и просто добавить немного силы удара для достижения оптимального эффекта.
Также нет смысла наносить удар на предельном расстоянии (близком к границе зоны кикса) при желании "донести" максимальное количество нижнего вращения до далекого прицельного шара. При одной и той же скорости кия: чем дальше точка удара от центра шара, тем меньше будет приданного поступательного движения при увеличении вращательного движения. При этом скорость вращения при приближении к границе зоны кикса увеличивается незначительно. Уменьшение поступательной скорости приведет к тому, что шару понадобится больше времени для того, чтобы достичь прицельный шар; а за это время сила трения, действующая в каждый момент времени "съест" большую часть нижнего вращения.
В бильярде рекомендуют для того чтобы донести максимальное нижнее вращение до отдаленного ПШ наносить удар на расстоянии 70-80% (0.35R-0.4R) от предельной величины плеча силы.
- удар (соударение) в четверть шара - удар (соударение), при котром биток заслоняет четверть видимого горизонтального диаметра ПШ, в силу чего угол резки составляет примерно 49°
-
удар (соударение) в полшара
- удар (соударение), при котром биток заслоняет половину видимого горизонтального
диаметра ПШ, в силу чего угол резки составляет примерно 30°.
(Линия прицеливания, направленная через центр битка, проходит через край ПШ) - удар (соударение) в три четверти шара - удар (соударение), при котром биток заслоняет три четверти видимого горизонтального диаметра ПШ, в силу чего угол резки составляет примерно 15°.
∠ φ - угол резки
AB=AE+EB;
AE=R; EB=DB-DE;
DB=R; DE=fr*(2*R);
EB=R-fr*(2*R);
AB=R+R-fr*(2*R)=2*R*(1-fr);
AC=2*R;
Правила (секреты) бильярда
Правило, устанавливающее, что после соударения естественно катящегося битка с ПШ, происходящего при плотности контакта от четверти (1/4) до трех четвертей (3/4) шара, траектория битка отклоняется примерно на 30° от направления его поступательного перемещения непосредственно перед соударением (финальное отклонение битка).
Правило, устанавливающее, что после соударения, в момент которого биток не имеет продольного вращения () - плоский удар - шары расходятся под углом 90°.
Правило, устанавливающее, что при толстом соударении (более чем в три четверти (3/4) шара) угол отражения битка примерно в 2.5-3 раза превышает угол резки.
Правило, устанавливающее, что после тонкого соударения (менее чем в четверть (1/4) шара), произошедшего в состоянии естественного качения, биток отражается под углом составляющим примерно 70% угла между направлением движения непосредственно перед соударением и тангенциальной линией.
Для ударов с "хорошей" оттяжкой на резке от 0 до 40 угол финального отклонения битка
будет примерно в 3 раза больше угла резки.
"Хорошая" оттяжка - это значит не слишком мало и не слишком много нижнего вращения на шаре.
Вращение определяется моментом силы, скалярное значение которого равно произведению
силы на плечо силы. Таким образом, все зависит от такого насколько сильно и как низко
нанесен удар. Также необходимо учитывать и расстояние до ПШ, т.е. понимать какое количество
нижнего вращения останется на битке к моменту соударения с ПШ.
Правило, устанавливающее, что после соударения , произошедшего в состоянии естественного качения (тихий естественный накат), финальное направление движения битка проходит через 2/7 отрезка между тангенсной линией и линией прицеливания (направление движения битка до соударения), построенного перпендикулярно тангенсной линии.
Поэтому, это правило удобно использовать для тихого естественного наката битка к моменту соударения с ПШ, когда после соударения с ПШ криволинейная часть траектории битка минимальна и биток практически сразу переходит в состояние естественного качения в финальном направлении.]
∠ φ - угол резки, ∠ δ - угол финального отклонения битка
OB - тангенсная линия, OA - линия прицеливания, OC - финальное направление битка
∠AOB=90-φ, ∠COB=90-φ-δ=90-(φ+δ)
Финальная скорость (скорость к моменту окончания скольжения) образуется на 5/7 от вектора начальной поступательной скорости в направлении тангенсной линии и на 2/7 от вектора противоположного вектору начальной скорости вращения.
По осям вращения (с учетом направления осей):
,
где , - проекции скорости .
- поступательная скорость битка сразу после соударения (в направлении тангенсной линии).
V - поступательная скорость битка к моменту соударения (в направлении линии прицеливания)
, - угловые скорости вращения к моменту (сразу после) соударения.
Ось Y направлена по линии прицеливания, ось X - перпендикулярно ей.
Финальный угол отклонения битка можно найти, посмотрев наклон траектории в момент времени окончания скольжения.
Учитывая, что биток находится в состоянии естественного качения () и биток не имеет вращения относительно оси Y (, что означает удар только с накатом, оттяжкой или клапштос).
Тогда,
Тогда,
Для наката угол финального отклонения называется углом прокатки, для оттяжки - углом отката.
Это выражение может дать ряд интересных закономерностей.
1) При заданном угле резки качение битка после некоторой фазы скольжения будет происходить по прямой линии, расположенной под одинаковым углом к направлению его движения до удара не зависимо от силы удара. То есть угол прокатки при заданном угле резки (плотность удара) будет одинаков для любой скорости естественно катящегося битка непосредственно перед соударением. То есть если биток успевает перейти в фазу качения к моменту соударения с ПШ, то сила удара не влияет на угол прокатки.
Разница будет только в длине фазы скольжения [форма кривой траектории скольжения битка будет одинакова, только разного масштаба].
Для того,чтобы найти угол резки (∠ φ) для максимального угла прокатки возьмем производную .
Для того, чтобы функция имела экстремум необходимо, чтобы производная этой функции была равна нулю. Для этого достаточно рассмотреть
Поэтому, считается, что сыграть биток накатом при толстой резке значительно труднее, чем при резке в полшара.